Tokyo (SCCIJ) – A young Swiss researcher is developing an artificial skin that could give robots a sense of touch in the fingers similar to humans. The technology would make them much more adept at handling objects.
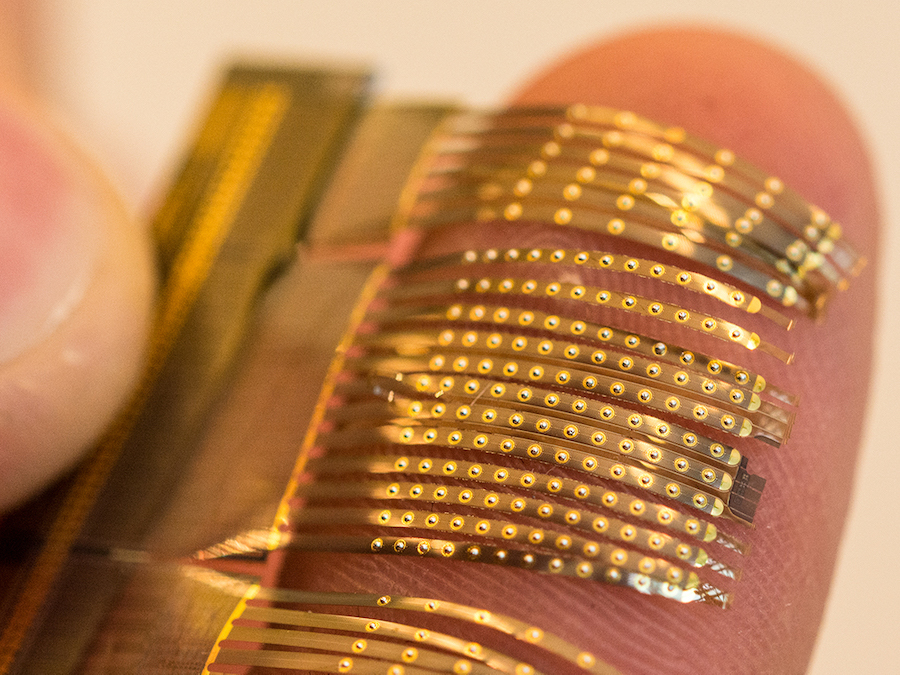
The pliable skin adapts to any surface. Clearly visible are the tiny beads that exert pressure on the sensing membrane (Picture: ETH Zurich /Johannes Weichart).
Hundreds of sensors
The human sense of touch is incredibly refined which makes it very difficult to give a robot a similar degree of nuance. Production robots, for example, can pick up and move objects with impressive dexterity. However, they first need to know the object location and require additional visual information for a better orientation. Even better, they have information about the sturdiness and the composition of an object before grabbing it.
Now, Johannes Weichart, a doctoral student in the Micro- and Nanosystems group at the Swiss Federal Institute of Technology Zurich, has developed an artificial skin that emulates the sense of touch in a human finger. Moreover, the artificial skin is pliable and can cover soft and unevenly formed materials – a robot gripper, for example, in the shape of a human finger.
Weichart equipped his artificial skin with numerous receptors. “You need around one sensor per square millimeter,” he explains. Each sensor comprises various layers, two of which are a conductive membrane and subjacent electrodes, which springs hold apart at a distance of three to four micrometers. Changes in the distance between them cause changes to an electrical signal captured by the electrodes.
A refined sense of touch
Half of the sensors consist of three electrodes rather than one. They measure the force applied to the bead at any one point and the angle of application. This setup gives the skin a much more nuanced sense of touch. “It means you can feel the quality and texture of a surface and recognize when an object is slipping over the ‘skin’ by sampling the sensors at high enough frequencies,” Weichart explains.
His supervisor and his advisor had recommended developing silicon-based touch sensors. But Weichart opted to embed the sensors in a flexible substrate. That way, it will be easier to mount them onto soft and uneven surfaces. “In retrospect, I think it was the right decision!”
Weichart has spent the first three years of his doctoral studies demonstrating that his idea functions in principle. The challenge now is to make the skin more robust and, crucially, suitable for concrete applications. This still requires some work.
“To be able to use the artificial skin in an everyday context, the sensors require a protective layer which we developed,” Weichart says. He also wants to radically simplify the output signal. Too much raw input data overwhelms a robot. “Humans also do not perceive the output of each receptor, but an overall impression,” he said.
Text: © Felix Würsten/ETHZ News, editing by SCCIJ